Le but de ce TD est d'implémenter
un algorithme d'approximation pour la reconstruction de courbes dans le plan.
Il s'agit de la version simplifiée de la méthode de Christofides que nous avons
vue en cours pour approximer
le Traveling Salesman Problem (TSP) dans des espaces métriques, et il est
utilisé dans le cadre de la
reconstruction de courbes en toutes dimensions.
Avant de demarrer, nous rappelons
que la
documentation de la
bibliothèque Jcg est consultable ici.
L'idée de
base est la suivante: étant donné une courbe connexe
C échantillonnée, une
manière
naturelle de reconstruire
C
est simplement de construire le plus petit cycle hamiltonien reliant
tous les échantillons. A priori ce cycle est calculé dans
le graphe
complet pondéré par la distance euclidienne. Cette
idée a la fois
simple et élégante est dûe à J. Giesen (voir
l'article
ici),
qui a également montré
qu'elle a du sens d'un point de vue théorique, à savoir :
- Sous des hypothèses de régularité de la
courbe et de densité minimale de l'échantillonnage, le
cycle hamiltonien le plus court forme un sous-complexe de la
triangulation de Delaunay des points qui est homéomorphe
à la courbe.
En fait, ce sous-complexe est le Delaunay restreint a la courbe.
- Bien que ce cycle puisse être très coûteux
à calculer en
general, il ne l'est pas dans ce contexte, et même certains
algorithmes
d'approximation (dont la version simplifiee de l'algorithme de
Christofides) suffisent à le faire en toutes dimensions.
La conséquence des remarques ci-dessus est qu'il est possible de
reconstruire des courbes en toutes dimensions par une technique
basée
sur la triangulation de Delaunay, sans avoir à calculer cette
dernière
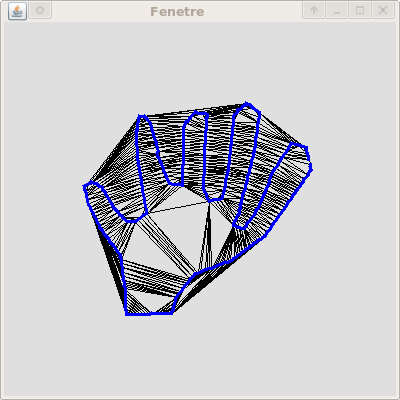
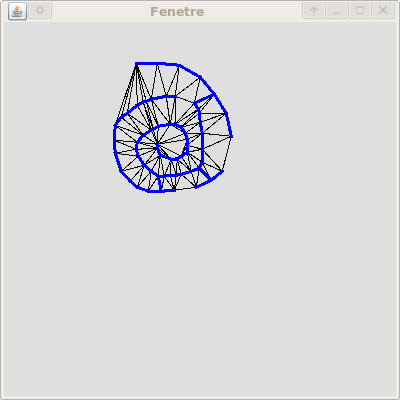
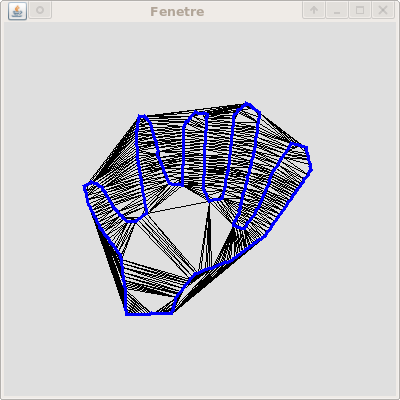
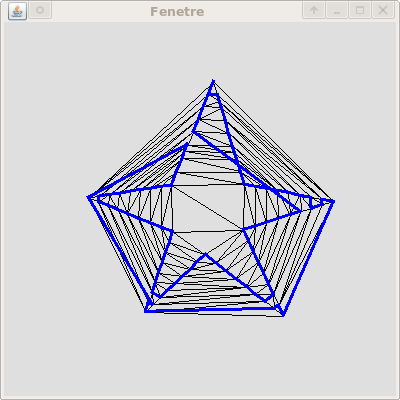
! Afin d'illustrer cette propriété nous allons
considérer le cas des
courbes planes. Ironiquement, dans ce cas le calcul explicite de la
triangulation de Delaunay permet d'accélérer le processus
(ce qui n'est
pas le cas en dimensions 3 et plus).
Donc en gros, le travail à faire consiste à implementer
la version
simplifiée de l'algorithme de Christofides, à savoir :
- Calculer le Minimum Spanning Tree (MST) du nuage de points. Pour
cela vous utiliserez l'algorithme
de Kruskal. Toutefois, au lieu de travailler sur le graphe complet,
vous travaillerez sur le graphe de la triangulation de Delaunay, dont
les arêtes seront pondérées par la distance
euclidienne entre leurs
sommets. Ceci permettra de réduire la complexite de l'algorithme
de O(n^2 log n) a O(n log n), tout en obtenant le
meme resultat puisque nous savons depuis la séance 2 que le MST
est
inclus dans le graphe de Delaunay. Nous recommandons de
coder le resultat du calcul dans la triangulation de Delaunay
directement, en
marquant simplement les arêtes du MST comme des arêtes de
contrainte
(en utilisant la methode mark()
de la classe HalfedgeHandle).
- Dédoubler les arêtes du MST. Pour cela vous pourrez
simplement
faire en sorte que chaque arête de contrainte de la triangulation
ait une arête symétrique elle-même marquée
comme arête de contrainte.
Ainsi votre MST dédoublé devient un sous-graphe
eulérien du graphe de
Delaunay, puisque tous ses sommets ont des degrés pairs.
- Calculer un cycle eulérien dans le MST
dédoublé, i.e. un cycle
passant une et une seule fois par chaque arête orientée du
MST.
Pour ce faire
nous recommandons d'utiliser l'algorithme suivant, qui est une version
simplifiee de l'algorithme
de
Fleury : on parcourt les arêtes du MST
de
manière gloutonne, en commençant par une feuille et en
"tournant" autour du MST toujours dans le meme sens (horaire ou
anti-horaire). Afin d'éviter de
repasser
par une arête deja visitée, on la supprime du sous-graphe
des qu'on la visite,
ce que vous
pourrez faire simplement en démarquant l'arete de Delaunay
correspondante.
Notez que cet algorithme est garanti de visiter toutes les aretes du
MST par le fait qu'il tourne toujours dans le meme sens autour de
l'arbre, qui dans le cas present est plonge dans le plan.
- Raccourcir le cycle eulérien. Pour cela il vous suffit de
le parcourir une fois en eliminant tout sommet déjà
visité lors du
parcours (sauf le premier lors de la visite de la dernière
arête du
cycle). Ainsi vous obtiendrez un cycle hamiltonien, que vous
retournerez sous la forme d'une liste de segments, de type List<Point_2[]>.