|
|
|
|
Table des matiŤres
Introduction sur le remplacement de motifsPour s'adapter aux diffťrentes lťgislations concernant la publicitť, des techniques vidťos ont ťtť mises au point. Une de ces techniques permet notamment de remplacer en temps rťel un motif dans une sťquence vidťo. On peut donc, lors d'une retransmission en direct, incruster dans l'image tťlťvisťe, une publicitť diffťrente suivant que les images sont destinťes au public franÁais, amťricain, russe, ou sud africain ... Lors d'un match de football ou de tennis, on peut par exemple modifier ŗ l'image et en temps rťel, les publicitťs qui bordent le stade. Le bulletin mťtťorologique utilise depuis longtemps une technique plus simple mais qui revient plus ou mois au mÍme. Le programme qui est prťsentť ici, incruste une image sur une sťquence vidťo montrant une camionnette qui passe dans une rue. Le motif s'adapte ŗ la position de la camionnette dans l'image. La technique utilisť est : le suivi de segments. Les mťthodes utilisťes
Ceci est un prť-traitement qui est fait par un autre programme. On a donc au dťpart une liste de chaÓnes de points, reprťsentant les contours de chacune des images que l'on va traiter. Split-MergeC'est le premier algorithme qui est rťellement insťrť dans le programme:
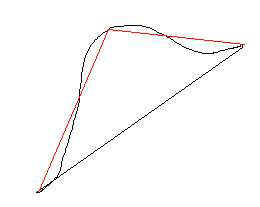
Description de l'algorithmeOn se donne un critŤre epsilon. On considŤre le segment limitť par le dťbut et la fin de la chaÓne de points, et on regarde quel est le point de la chaÓne le plus ťloignť de ce segment. Si la distance du point au segment est supťrieure ŗ epsilon, alors on ťtudie les deux segments dťbut-point et point-fin. Et ainsi par rťcurrence. C'est l'algorithme split.
Ensuite pour diminuer le nombre de segments, on prend les trois premiers points et on regarde si l'on peut en faire un segment (suivant le critŤre prťcťdent). Si oui, on relie le premier point avec le troisiŤme point et on recommence. Si non, on essaie en commence par le deuxiŤme point. C'est l'algorithme merge.
Limites
Tracking SimpleOn choisit un segment (parmi ceux trouvťs par split-merge), on regarde sa vitesse et son accťlťration, et on suppose qu'elles sont voisines d'une image sur l'autre. Connaissant la vitesse et l'accťlťration d'un segment on essaie de deviner quelle sera sa position dans l'image suivante. Ensuite on dťtermine quel est le segment de l'image suivante (parmi ceux trouvťs par split-merge) qui est le plus proche du segment supposť. Si ce segment est suffisamment proche (suivant un critŤre donnť), on dťcide que c'est bien le segment recherchť. On met alors ŗ jour la vitesse et l'accťlťration du segment dans la nouvelle image, et on recommence. suivi d'un segment aprŤs trois images
Tracking ťvoluťCela commence comme le tracking simple, mais maintenant on ne compare plus le segment supposť aux segments trouvťs par split-merge. A partir du segment supposť on recherche une chaÓne de points voisine, qui pourrait ressembler ŗ un segment. Si on trouve une telle chaÓne de points, on en fait un segment (par split-merge dans mon programme) et on dťcrŤte que c'est le segment recherchť. Cette mťthode donne de meilleurs rťsultats que la premiŤre, car on n'est plus gťnť par le fait que split-merge ne renvoie pas les mÍmes segments d'une image sur l'autre. Insertion du motifEn suivant (par la mťthode dťcrite ci-dessus), deux segments de la camionnette, on obtient la position dans chaque image, de quatre points de la camionnette. Ces points sont suffisants pour dťterminer l'homographie qui transforme un rectangle en l'image de la face de la camionnette. On alors la position prťcise de la camionnette dans l'image, et on peut donc incruster notre motif. Dans le programme fourni, on ne calcule pas l'homographie complŤtement. Considťrant la petite taille de l'image, on se contente d'un changement de repŤre (la face de la camionnette est alors un parallŤlogramme, et non pas un quarilatŤre quelconque). Ceci permet d'allťger les calculs et d'accťlťrer le traitement. De toute faÁon, les resultats du tracking ne sont pas suffisamment bons pour se donner la peine de faire un calcul exact. insertion du motif
Les problŤmes rencontrťs
ConclusionLe rťsultat n'est pas fameux, mais il illustre bien la difficultť de suivre un objet dans une sťquence vidťo. Une sťquence en couleurs aurait peut-Ítre ťtť plus facile ŗ ťtudier ? Rien n'est moins sŻr. Je pense que la mťthode du suivi de segments n'est pas trŤs adaptťe pour ce type de sťquence vidťo. Mais il est sŻr qu'elle donne des rťsultats mÍme dans une scŤne aussi complŤxe que celle-ci. Dans un environnement plus simple et plus gťomťtrique on pourrait atteindre de trŤs bons rťsultats. Enfin, ... Je ne conseillerai mon programme ŗ aucune chaÓne de tťlťvision ... RťfťrencesVoici le source du programme avec tout ce qui est nťcessaire.
Sur l'auteurfait ŗ Palaiseau le 5 janvier 1999 Laurent MIRGUET |
 Avant de
commencer toute autre technique, il faut extraire les contours de l'image. (cf image ŗ
droite).
Avant de
commencer toute autre technique, il faut extraire les contours de l'image. (cf image ŗ
droite).